ربات کرم خاکی
ربات کرم خاکی
محققان و مهندسان حوزهی رباتیک با مطالعه بدن جانوران و ایده گرفتن از مکانیزم های حرکتی آنان، رباتهایی را میسازند که بتوانند مانند جانوران بدودند، شنا نمایند و یا پرواز کنند. به این نوع از ربات ها، ربات حیوان نما (Animaloid Robot) میگویند.
ربات سمندر، ساخته شده توسط مهندسین دانش سرای فدرال لوزان
ربات های حیوان نما تواناییها و کاربردهای متفاوتی دارند. برای مثال رباتی که شبیه پرندهای خاص پرواز میکند میتواند به عنوان ربات جاسوس مورد استفاده قرار گیرد و یا رباتی که به شکل ماهی خاصی طراحی و ساخته شده است میتواند در کسب اطلاعات جالب از زندگی آبزیان در اعماق دریا و یا ساخت فیلمهای مستند حیات وحش مفید واقع شود. ضمن این که بعضی جانوران مانند حشرات به خاطر ویژگیهای خاص حرکتی و بدنی، قابلیت دسترسی و نفوذ به مکانهایی را دارند که برای ما غیر ممکن است . برای مثال میتوان از ربات سوسک برای نفود داخل آوارها و یافتن افراد زندهی محبوس استفاده کرد .

ربات چهارپای نیروی دریایی آمریکا که برای حمل تجهیزات در جبهه های نبرد از آن استفاده میشود.
یکی از موضوعاتی که برای محققین رباتیک جالب توجه است نحوهی حرکت کرم است و تا به حال رباتهای متفاوتی با ایده گرفتن از حرکت کرمها و یا مارها طراحی و ساخته شدهاند. شما نیز در این صفحه، پس از آشنایی با نحوه حرکت کرمها و چند مکانیزم مکانیکی مفید میتوانید یک ربات کرم نما بسازید و سپس ظاهر آن را مطابق سلیقه خود تغییر دهید.
کرمها از نظر شکل ظاهری و محیطی که در آن زندگی و تغذیه میکنند انواع مختلفی دارند، اما از نظر نوع حرکت به دو نوع کلی تقسیم میشوند:
نوع اول:
مانند یک نردبان دو طرفه، با باز و بسته کردن بدن خود (مانند عمل وجب گرفتن با دست) حرکت میکنند و به آنها کرم وجب گیر (Inch Worm) میگویند. مثلاً کرم سیب از این نوع کرم میباشد. در شکل زیر نمای شماتیک حرکت این نوع کرم را میبینید.

یک نمونه اینچ ورم: این نوع کرم ها برای حرکت به جلو، بدن خود را از وسط تا کرده سپس باز میکنند.
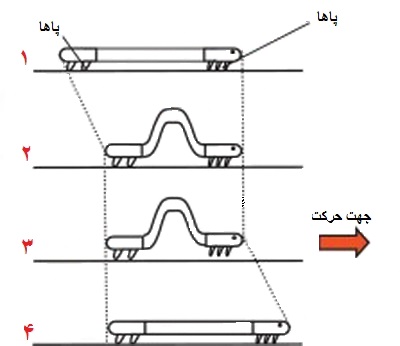
مکانیزم حرکت اینچ ورم
نوع دوم:
اما نوع دوم با منبسط و منقبظ کردن بدن خودشان و با کوتاه و بلند شدن در راستای طولشان (مانند یک فنر) حرکت میکنند. حرکت کرم های خاکی یا Earth worm به همین صورت است. در ادامه با برخی از ویژگیهای این جانور آشنا خواهیم شد.
اگر در یک روز بارانی با یک بیلچه، مقداری از خاک باغچه منزلتان را حفر کنید به احتمال زیاد تعدادی کرم باریک به رنگ صورتی و یا قهوهای مشاهده خواهید کرد که در زیر سطح خاک زندگی میکنند. این کرمها که کرم خاکی نام دارند در هر روز تقریباً به اندازهی وزن خود غذا میخورند و دفع می کنند و از طریق تولید کود، کمک بسیاری به حاصل خیزی خاک میکنند. علاوه بر این، با حفر سوراخهای متعدد داخل خاک موجب آب رسانی و هوا رسانی بیشتربه قسمتهای مختلف خاک شده باعث تقویت شرایط رشد و نمو گیاهان میشوند.

همانطور که گفته شد کرم های خاکی با کاهش و افزایش طول بدن خود به سمت جلو میخزند. برای این که این نوع حرکت (انبساط و انقباض طولی) را در ربات ایجاد کنیم و سازه بتواند به سمت جلو حرکت کند، لازم است که دو مکانیزم مکانیکی مفید را بیاموزیم:
مکانیزم آکاردئونی:
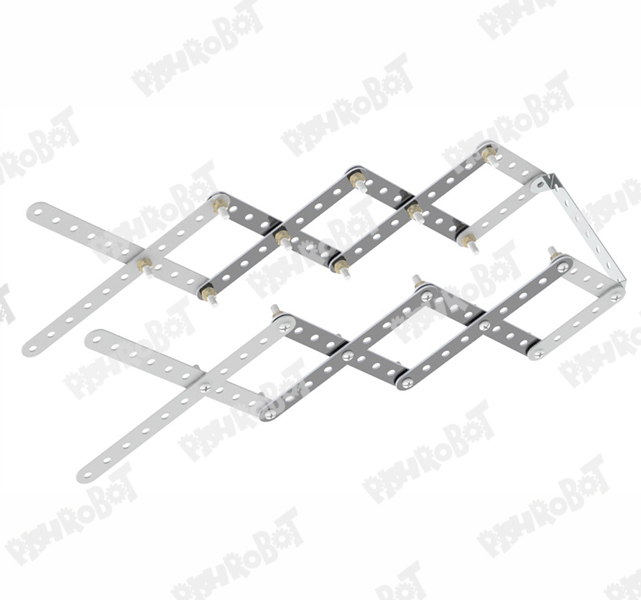
برای ساخت مکانیزم آکاردئونی تسمههای فلزی را به صورت دو به دو و از سوراخ وسط و توسط اتصال دو مهره به یکدیگر متصل میکنیم تا چند عدد قیچی ساخته شود. سپس قیچیها را با روش دو مهره، به یکدیگر وصل میکنیم.

تصویر یک مکانیزم آکاردئونی: همه اتصالات از توع مفصل و به روش دومهره انجام گرفته است.
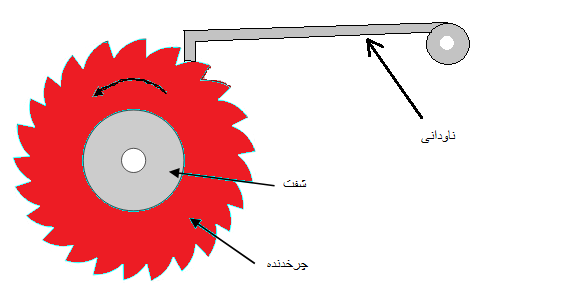
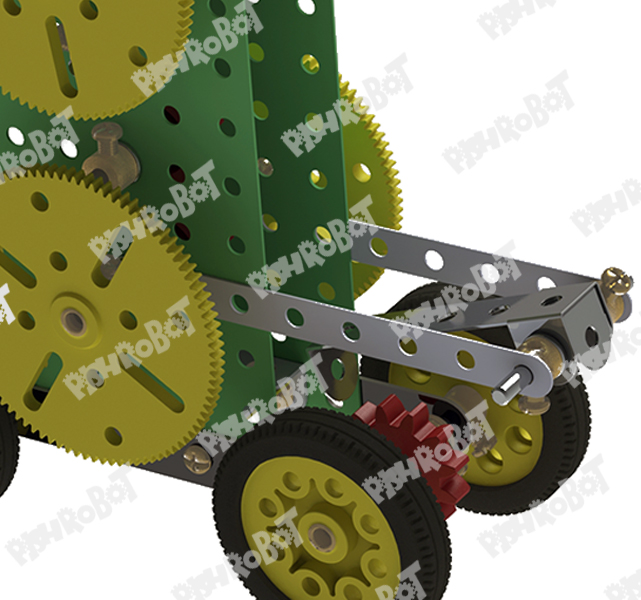
مکانیزم رچت:
این مکانیزم زمانی به کار میرود که بخواهیم محور ما فقط در یک جهت قابلیت چرخش داشته باشد. برای ساخت این مکانیزم میتوان از نصب یک چرخ دنده قرمز روی محور و یک ناودانی استفاده کرد. به این صورت که انتهای ناودانی را به صورت مفصل به سازه متصل کنیم و انتهای دیگر آن را به صورت آزاد بر روی چرخدنده قرار دهیم.
حال میخواهیم با استفاده از مکانیزم هایی که به آن ها اشاره کردیم و مطالبی که تا به حال در کلاس های پیشروبات آموختهایم، ربات کرم خاکی را مرحله به مرحله بسازیم:
مراحل ساخت
۱- ساخت شاسی
نصب نبشی ها به یکدیگر توسط صفحات زرد
نصب صفحات سبز و تسمه های فلزی (یاتاقان سازی برای ساخت گیربکس و نصب چرخ)


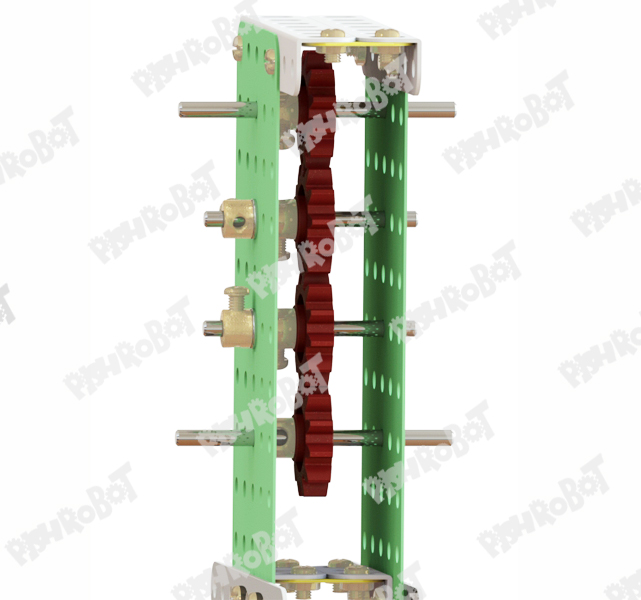
۲- ساخت گیربکس
نصب چرخ دنده های قرمز کوچک به منظور انتقال نیرو
۳- نصب موتور و چرخ دندههای زرد
در این مرحله گیربکس قدرتی ساخته میشود و انتقال نیرو از چرخ دنده پینیون به چرخ دنده زرد با نسبت یک به پنج میباشد. چرخ ها نیز در این مرحله نصب میشوند.

۴- ساخت قسمت سر کرم (خلاقانه)
برای حفظ تعادل این قسمت بایستی به صورت چهار چرخ ساخته شود. شکل زیر یک نمونه ی پیشنهادی است. شما میتوانید سر کرم خود را به هر شکل که خواستید بسازید.

۵- ساخت رچت برای قسمت انتهایی و قسمت سر کرم خاکی
بعد از ساخت رچت ها، آنها را تست کنید، به صورتی که سازه فقط به سمت جلو بتواند حرکت کند و موقع شروع حرکت به عقب، محور چرخ ها قفل شود.

۶- ساخت مکانیزم آکاردئونی
توجه: درساخت قسمت آکاردئونی به اندازه ی تسمه ها دقت کنید.
۷- اتصال سه قسمت اصلی به یکدیگر و تکمیل ربات


